0、关于
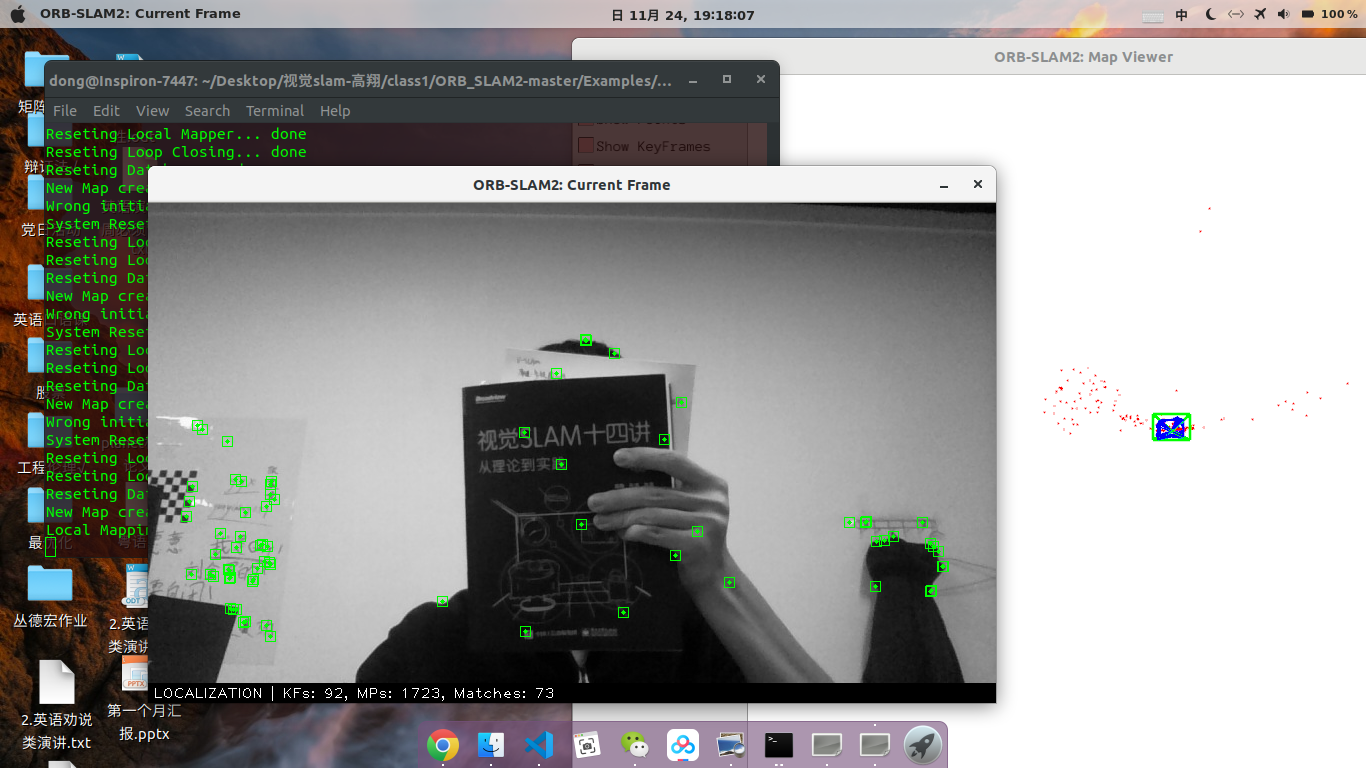
使用摄像头或视频运行 ORB-SLAM2,记录填坑以及实现过程.
1、安装Pangolin (耗时1h)
“对于 pangolin(一个 GUI 库),你需要下载并安装它,它同样是个 cmake 工程” 这个东西安装没那么难,根据书上网上教程cmake.. 之后 make是一直报错的,
cmake --build .解决
1
2
3
4
5
6
$ git clone https://github.com/stevenlovegrove/Pangolin.git
$ cd Pangolin
$ mkdir build
$ cd build
$ cmake ..
$ cmake --build .
2、ORB_SLAM2编译 (耗时2h)
- 1.注意安装
libsuitesparse-dev-qt4需要指定版本,在ORB_SLAM2编译过程中出现了无数warning跟error,不过error(usleep)都是因为缺少#include <unistd.h>头文件,添加过后编译通过
1
2
3
4
5
6
$ sudo apt-get install libopencv-dev libeigen3-dev libqt4-dev qt4-qmake libqglviewer-dev libsuitesparse-dev-qt4 libcxsparse3.1.2 libcholmod-dev
$ git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
$ cd ORB_SLAM2
$ chmod +x build.sh
$ ./build.sh
- 2.移植高翔作业中所给程序myslam.cpp以及标定myslam.yaml,首先需要将上述两个文件放到个demo程序里.此处我放到
../ORB_SLAM2-master/Examples/Monocular/myslam.cpp(当然是因为Monocular为单目相机)并且在../ORB_SLAM2-master/CMakeLists.txt中添加:
1
2
3
add_executable(myslam
Examples/Monocular/myslam.cpp)
target_link_libraries(myslam ${PROJECT_NAME})
- 3.更改myslam.cpp中变量路径
string parameterFile以及string vocFile. - 4.重新编译
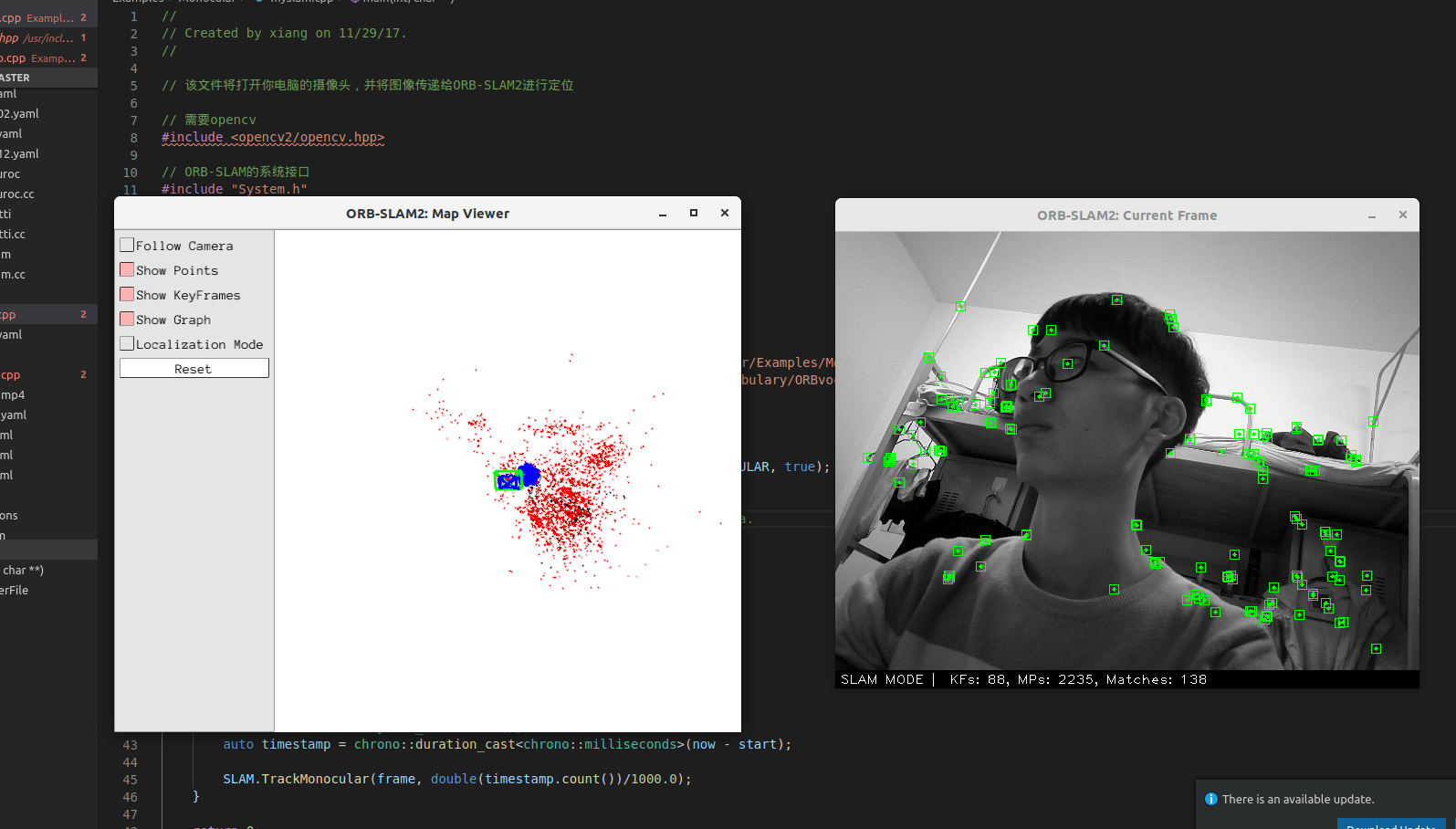
- 5.运行
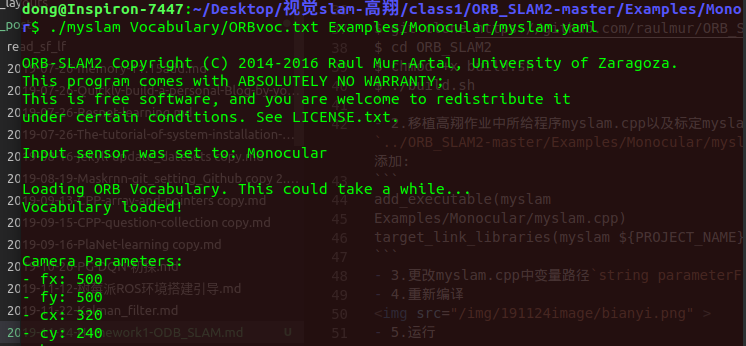
1
dong@Inspiron-7447:../ORB_SLAM2-master$ ./myslam Vocabulary/ORBvoc.txt Examples/Monocular/myslam.yaml
结语
跟着课程来做,督促自己一下.

挖坑
12月源码解析: