0.关于本文
上一篇中使用blender对m100结构等进行了精确设计,各个零件的导出文件以及设计工程已经放在了Github,算是整合了好几个工程中有用的部分,后面会跟同伴创建Organizations将工程一起放进去Github.
1.数据处理
所需采集数据类型
- 0324网络输入数据:
维度:9维
位置误差pos_err.x, pos_err.y, pos_err.z
速度误差vel_err.x, vel_err.y, vel_err.z
欧拉角误差eluer_err.x, eluer_err.y, eluer_err.z - 网络输出数据:
维度:4维
四个电机的角速度rotor_0_vel, rotor_1_vel, rotor_2_vel, rotor_3_vel - 0331更新:
odom+trajectony->lee_position_control->mottor_speed(angle)(vx,vy,vz)
保存ros话题数据
1 - /src同目录下创建/bagfile,并cd进入
2 - 启动launch文件同时保存所有话题数据
1
2
3
$ rosbag record -a + $ roslaunch rotors_gazebo neu_m100_start.launch
或者只保存部分
$ rosbag record /NEU_m100/imu /NEU_m100/gps /NEU_m100/motor_speed
3 - 查看数据包属性
1
2
3
4
5
6
7
8
9
10
11
12
$ rosbag info 2020-03-07-09-16-24.bag
dynamic_reconfigure/Config [958f16a05573709014982821e6822580]
dynamic_reconfigure/ConfigDescription [757ce9d44ba8ddd801bb30bc456f946f]
gazebo_msgs/LinkStates [48c080191eb15c41858319b4d8a609c2]
gazebo_msgs/ModelStates [48c080191eb15c41858319b4d8a609c2]
geometry_msgs/PointStamped [c63aecb41bfdfd6b7e1fac37c7cbe7bf]
geometry_msgs/Pose [e45d45a5a1ce597b249e23fb30fc871f]
geometry_msgs/PoseWithCovarianceStamped [953b798c0f514ff060a53a3498ce6246]
geometry_msgs/TransformStamped [b5764a33bfeb3588febc2682852579b0]
geometry_msgs/TwistStamped [98d34b0043a2093cf9d9345ab6eef12e]
......
4 - 转换成txt保存[这里使用脚本solve_data.sh]
1
$ rostopic echo -b 2020-03-07-09-16-24.bag -p geometry_msgs/Pose > m100_data.txt
试想如果执行这条指令多快?这样就能保存多个话题数据了耶
1
$ rostopic echo -b 2020-03-07-09-16-24.bag -p geometry_msgs/Pose geometry_msgs/PointStamped ... > m100_data.txt
因为$rostopic echo..这指令一次只能对一个话题数据进行处理,我这十多个话题每次都这么搞岂不是麻烦死?
shell脚本处理
1 - 目录下创建sove_data.sh,使用vscode编写
1
touch sove_data.sh
2 - ctrl+shift+c调出命令行窗口运行之前要改权限
1
$ chmod +x sove_data.sh
3 - 运行
1
$ ./sove_data.sh
CODE solve_data.sh:
1
2
3
4
5
6
7
8
9
10
#! /bin/bash
ls -a
echo -e "Pls input the name of bag : \c "
read filename
echo output /NEU_m100/gps
rostopic echo -b $filename -p /NEU_m100/gps > $PWD/data/gps.txt
echo output /NEU_m100/imu
rostopic echo -b $filename -p /NEU_m100/imu > $PWD/data/imu.txt
......
txt数据处理方法
python
Ros保存的话题数据从.bag中提取出来之后所有数据均用逗号分隔开,所以这里关键用到readlines和split语句.一个是逐行读入数据为列表,一个是按指定方式将列表元素进行拆分成新的元素.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
class Trajectory():
def __init__(self,
trajectory_fileName = 'trajectory.txt',
trajectory_time = [],
trajectory_seq = [],
trajectory_stamp = [],
trajectory_translation_x = [],
trajectory_translation_y = [],
trajectory_translation_z = []):
self.trajectory_fileName = trajectory_fileName
self.trajectory_time = trajectory_time # 时间
self.trajectory_seq = trajectory_seq
self.trajectory_stamp = trajectory_stamp # 时间戳
self.trajectory_translation_x = trajectory_translation_x # 轨迹变换x
self.trajectory_translation_y = trajectory_translation_y # 轨迹变换y
self.trajectory_translation_z = trajectory_translation_z # 轨迹变换z
def loadTrajectoryDataSet(self, trajectory_fileName):
with open(trajectory_fileName, 'r') as f:
data = f.readlines() # txt中所有字符串读入data sum=14814
for line in data:
trajectory = line.strip().split(',') # 将数据拆分易存储
self.trajectory_time.append(trajectory[0])
self.trajectory_seq.append(trajectory[1])
self.trajectory_stamp.append(trajectory[2])
self.trajectory_translation_x.append(trajectory[5])
self.trajectory_translation_y.append(trajectory[6])
self.trajectory_translation_z.append(trajectory[7])
return 0
这里trajectory_变量定义太多,重复性复制粘贴特别麻烦,使不使用init初始化在后面确实没啥大的差别,但是为了规范代码,还是费力少点bug.
cpp
从十四讲例程中扣一段,做个记录.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
int main(int argc, char **argv) {
string trajectory_file = 'path';
ifstream fin(trajectory_file);
if (!fin) {
cout << "cannot find trajectory file at " << trajectory_file << endl;
return 1;
}
while (!fin.eof()) {
double time, tx, ty, tz, qx, qy, qz, qw;
// 依次读入
fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;
Eigen::Isometry3d Twr;
Twr(Quaterniond(qw, qx, qy, qz));
Twr.pretranslate(Vector3d(tx, ty, tz));
poses.push_back(Twr);
}
cout << "read total " << poses.size() << " pose entries" << endl;
}
2.源码分析
rqt_graph 显示话题关系
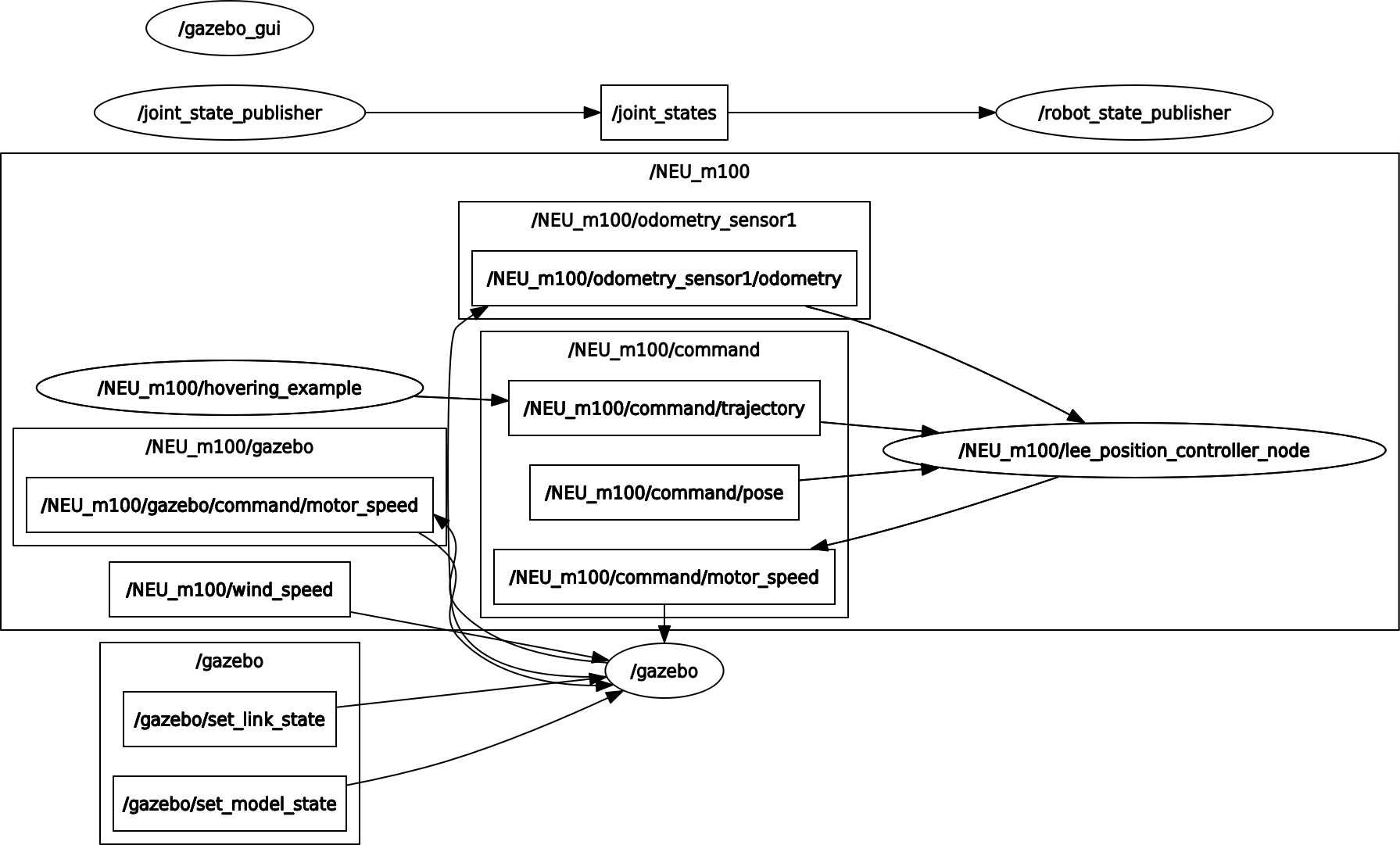
CrazyS PositionController.cpp 分析
结构体构造函数鉴赏
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
struct EigenOdometry {
EigenOdometry()
: position(0.0, 0.0, 0.0),
orientation(Eigen::Quaterniond::Identity()),
velocity(0.0, 0.0, 0.0),
angular_velocity(0.0, 0.0, 0.0) {};
EigenOdometry(const Eigen::Vector3d& _position,
const Eigen::Quaterniond& _orientation,
const Eigen::Vector3d& _velocity,
const Eigen::Vector3d& _angular_velocity) {
position = _position;
orientation = _orientation;
velocity = _velocity;
angular_velocity = _angular_velocity;
Eigen::Vector3d position;
Eigen::Quaterniond orientation;
Eigen::Vector3d velocity;
Eigen::Vector3d angular_velocity;
};
初始化结构体,并设默认值
1
EigenOdometry odometry_;
使用话题数据给里程计赋值
1
2
3
4
5
6
7
inline void eigenOdometryFromMsg(const nav_msgs::OdometryConstPtr& msg,
EigenOdometry* odometry) {
odometry->position = mav_msgs::vector3FromPointMsg(msg->pose.pose.position);
odometry->orientation = mav_msgs::quaternionFromMsg(msg->pose.pose.orientation);
odometry->velocity = mav_msgs::vector3FromMsg(msg->twist.twist.linear);
odometry->angular_velocity = mav_msgs::vector3FromMsg(msg->twist.twist.angular);
}
常量构造函数调用,不改变当前的里程计数值
1
2
3
4
5
6
7
void PositionController::SetOdometryWithoutStateEstimator(const EigenOdometry& odometry) {
odometry_ = odometry;
// Such function is invoked when the ideal odometry sensor is employed
SetSensorData();
}
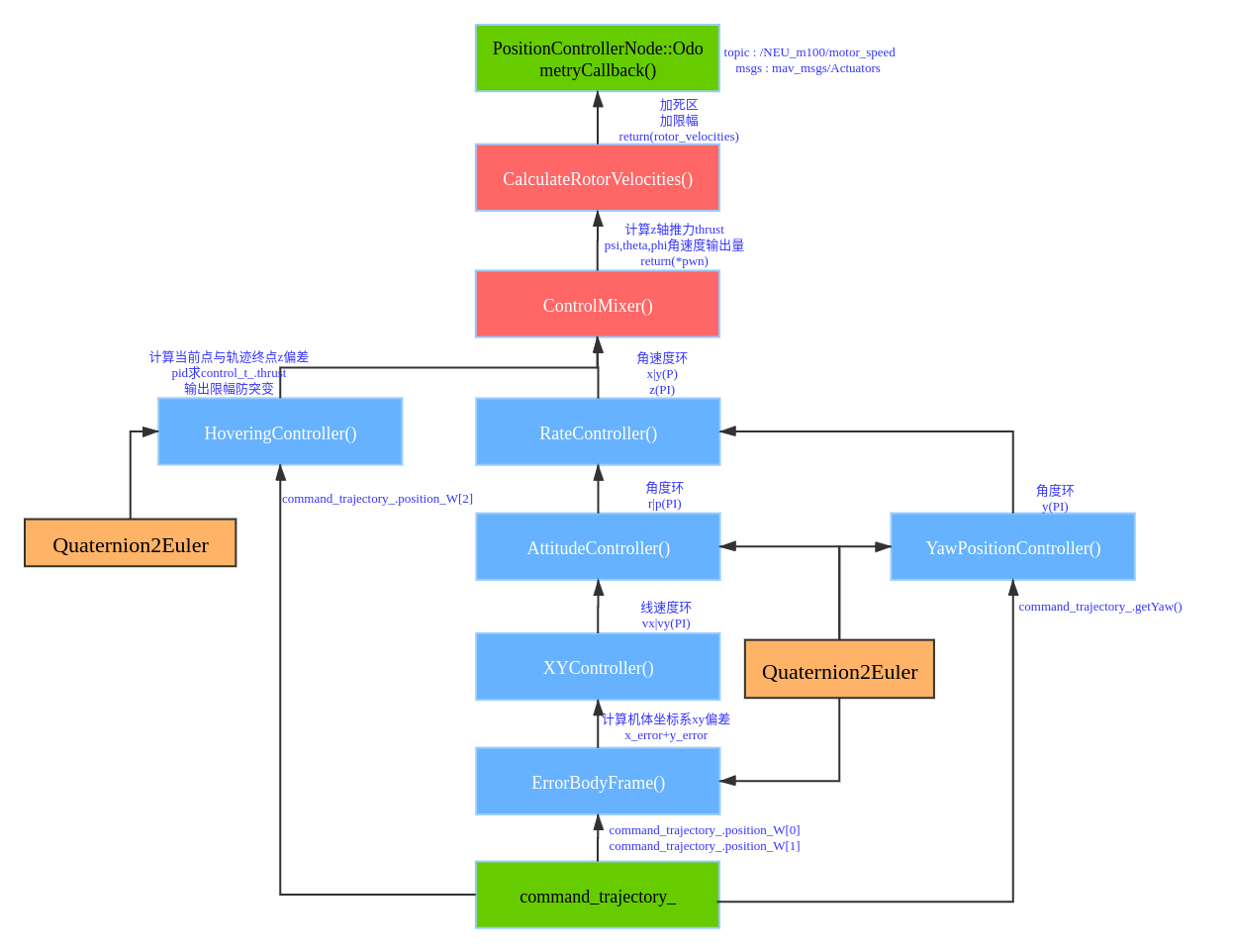
RotorS 飞控电机控制
通过机载odom以及设定的目标点位置与目标速度计算加速度
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
void LeePositionController::ComputeDesiredAngularAcc(const Eigen::Vector3d& acceleration,
Eigen::Vector3d* angular_acceleration) const {//作为常数函数 不可修改类中变量
assert(angular_acceleration);//无则报错
// 当前姿态4×1->三维旋转矩阵3×3 https://stackoverflow.com/questions/36501262/quaternion-to-rotation-matrix-incorrect-values-using-eigen-library/36502963#36502963
// tf::Matrix3x3 m(q);相同 得到旋转矩阵 前者用tf类计算
Eigen::Matrix3d R = odometry_.orientation.toRotationMatrix();
// Get the desired rotation matrix.
Eigen::Vector3d b1_des;
// 偏航 yaw=0
double yaw = command_trajectory_.getYaw();
b1_des << cos(yaw), sin(yaw), 0;
Eigen::Vector3d b3_des;
// (44)
b3_des = -acceleration / acceleration.norm();//2范数
Eigen::Vector3d b2_des;
// (43) 向量 |A||B|sim() Return the cross product between this and another vector
b2_des = b3_des.cross(b1_des);//
b2_des.normalize();
// Rc 3×1 列向量
Eigen::Matrix3d R_des;
R_des.col(0) = b1_des;
// R_des.col(0) = b2_des.cross(b3_des);//不是b1_des?
R_des.col(1) = b2_des;
R_des.col(2) = b3_des;
// (42) e_R
Eigen::Matrix3d angle_error_matrix = 0.5 * (R_des.transpose() * R - R.transpose() * R_des);
Eigen::Vector3d angle_error;
vectorFromSkewMatrix(angle_error_matrix, &angle_error);
Eigen::Vector3d angular_rate_des(Eigen::Vector3d::Zero());
angular_rate_des[2] = command_trajectory_.getYawRate();
// (42)e_omiga
Eigen::Vector3d angular_rate_error = odometry_.angular_velocity - R.transpose() * R_des * angular_rate_des;
// Eigen::Vector3d angular_rate_error = odometry_.angular_velocity - R_des.transpose() * R * angular_rate_des;
// (41)M = 转动惯量*angular_acceleration
// odometry_.angular_velocity.cross(odometry_.angular_velocity)=0
*angular_acceleration = -1 * angle_error.cwiseProduct(normalized_attitude_gain_)
- angular_rate_error.cwiseProduct(normalized_angular_rate_gain_)
+ odometry_.angular_velocity.cross(odometry_.angular_velocity); // no J,we don't need the inertia matrix here
}
通过计算得到的加速度计算角加速度-参考
1
2
3
void LeePositionController::ComputeDesiredAngularAcc(const Eigen::Vector3d& acceleration,
Eigen::Vector3d* angular_acceleration)
由角加速度+计算的推力转化成四个电机转速发布到话题 motor_speed
1
2
void LeePositionController::CalculateRotorVelocities(Eigen::VectorXd* rotor_velocities)
n.附件
东大地理参数
1
2
3
4
5
6
7
8
9
10
https://www.ngdc.noaa.gov/geomag/calculators/magcalc.shtml#igrfwmm
东北大学
gps_update_freq="5.0"
lat:41° 45' 57" lon:123° 25' 30"
latitude=41.765833
longitude=73.984000
alt=50
reference_magnetic_field_north="0.26764"
reference_magnetic_field_east="-0.04413"
reference_magnetic_field_down="0.47029"