项目运行环境
硬件环境:8核Intel(R) Core(TM) i7-6700K CPU @ 4.00GHz处理器,单卡NVIDIA GTX 1060显卡
操作系统:ubuntu 18.04
Apollo: v6.0.0
lgsvl: svlsimulator-linux64-2021.3
官方相关文档:https://www.svlsimulator.com/docs/
相关配置视频:https://www.bilibili.com/video/av414824262/
起因
大噶伙应该都知道,现在随着apollo生态做的越来越好,不少公司开始直接使用开源apollo的程序来进行商业开发.这个趋势确实也不错,像物流车现在发展的如火如荼 可真是多亏了Apollo程序的开源(各个大厂都是哦~).软件方面实现了基本框架的搭建以及开箱即跑的自由之后,硬件小20w的成本也就不在话下了。但是对于我这种习惯 了白嫖的应届差学生来说这么好的仿真环境如果只是Dreamview跑跑routing、planning可就太可惜了,没有硬件就玩不了了吗?
Lgsvl仿真 ` 王方浩:这里主要介绍下Lgsvl这款仿真器,它是由LG电子美国研发中心基于Unity开发的适用于自动驾驶开发者的多机器人模拟器。可以直接和Autoware和Apollo进行对接, 同时还提供生成高精度地图。只需要做很小的集成就可以用来测试和验证整个自动驾驶系统。 `
说实话想折腾这两个联调真是一时兴起,网上的多是apollo装虚拟机后win装lgsvl联调,困难在于ip通信;鉴于实验室台式机性能还可以我就直接都在ubuntu上开搞了。 一开始apollo版本是branch:master,调试了一下午愣是无法实现完全的routing、planning以及control的联合调试效果,无奈之下只好考虑降低apollo版本(master->v5.0.0)
配置过程及采坑
- apollo正常安装通过,可进行dreamview可视化等操作。
- LGSVL仿真器的安装下载网址为:https://www.lgsvlsimulator.com/ 下载linux版本(svlsimulator-linux64-2021.3)
- 解压后启动 ./SVLSimulator即可打开软件,此处需要注册账号等操作。注册完成后需要添加Simulations任务,如图所示选择车辆与地图信息
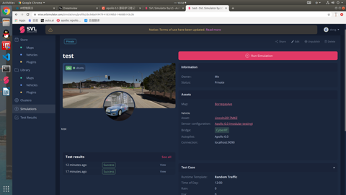
- 点击启动仿真即可在SVLSimulator中出现仿真画面,首先会自动下载地图信息.
- 进入apollo dock容器下,执行下列命令:
1
2
bash scripts/bootstrap_lgsvl.sh
bash scripts/bridge.sh //执行完毕后保持卡住,没有任何输出状态 完成与仿真器的连接
- 启动 http://localhost:8888/ DV界面,选择地图,车辆,切换到Module Controller上,打开定位localization模块,这里可以参考B站视频.
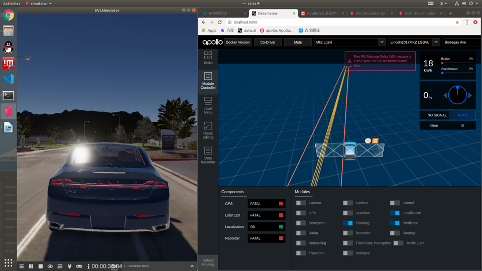
-
点击SVLSimulator左下角启动即可使用方向盘进行控制。F12复位 w s拉伸视角
-
目前来看已经能够获取到车辆底盘与预测数据,正好欠缺 决策规划跟控制 (狗头)
1 2 3 4 5 6 7 8 9 10
├── /apollo/canbus/chassis | ├── /apollo/sensor/gnss系列定位数据 | ├── /apollo/perception/obstacles | ├── /apollo/perception/traffic_light . . 包含lidar126以及radar等数据 .
tips:
<1> routing线出现之后遇到planning等模块报红、车辆不动没现象的时候要先点Reset All,再点Setup,甚至多次,等一会儿出规划线之后就能自己跑了.
<2> 整个过程不用开Simcontrol,直接给routing点即可
QA环节
Q:能够订阅apollo/control/数据 ,但是得想办法发出去,让这个仿真软件订阅到.
- A:
Modole controller这个选项中启动control模块即可.
Q:目前存在问题:/apollo/sensor/lidar128/compensator/PointCloud2话题接收不到数据.
- A:Lgsvl中6.0的林肯模型还没有加入Lidar等传感器,只能从话题拿到
/apollo/perception/obstacles数据直接来用.
Q:LGSVL里面林肯车型怎么选择??
- A:(1) Apollo5.0(full analysis)这辆车有Radar跟Lidar传感器,使用的时候效果跟B站视频是一样的,适合感知预测的同学。(2) Apollo6.0(modular testing)这辆车使用的3D Ground Truth,省去了感知并带有预测,适合直接搞决策规划控制的同学。